Simulation and
Coordination of
Mobile Robots
- Object
Reconstruction Using Large Quantities of Cube Robots (Honours project
of Sehwan Lee)
Consider
the
scenario
in
which
we
placed
a 3D environment scanner into an
arbitrary room with various everyday objects (e.g., furniture) and
produced a 3D model of what is in the room. Now letting
thousands of
small cube-shaped robots into an empty room which has the same
proportions as the scanned room. We are investigating
algorithms in
which the robots will autonomously re-build a physical 3D
representation of the model that was scanned in. This is
similar to
the idea of automatically having the robots coordinate and merge
together to build a physical lego-like (or minecraft-like) structural
representation of the actual room with the furniture. The
robots need
to be designed in a manner in which they can flop around as well climb
one another and attach themselves together in a manner that is
structurally sound. We are working on simulations of such
robots at
this time.

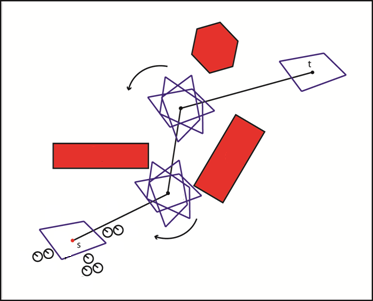
- Coordinated Object Pushing by a Team of Robots (Masters Thesis of Pierre Chamoun)
Mobile
robots
can
be
used
to
solve various real-world problems without human
supervision. Teams of robots are sometimes required because
the a single robot may not have enough power or agility to manipulate
large heavy objects such as pushing heavy items in a factory,
transporting dangerous goods, or pushing a boat into a
port. We have been researching algorithms to coordinate a
team of autonomous mobile robots to solve the task of pushing an
arbitrary 2D polygonal-shaped fixed-weight object from one location to
another in a 2D environment with various polygonal objects.
The problem requires the robots to place themselves around the
push-object efficiently so as to be able to transport the object
smoothly and as quick as possible along a computed path
trajectory. Depending on the number and placement of the
obstacles, the problem usually requires the push-object to be rotated
at various times during the transportation (much like having to adjust
the orientation of a couch being moved into an apartment).
The robots must have a strategy for re-positioning themselves
efficiently around the push-object as well as having a strategy to
coordinate the efforts of all the robots so that the push-object is
always moving in the correct direction.
- Weight Distribution for a Team of Lifting Robots (Masters Thesis of Mike Doherty)
When
teams
of
robots
are
assigned
to lift a large heavy object (e.g., for
transportation purposes), it is important that the weight is
distributed among the robots. Proper weight distribution
will help to minimize the number of robots required to lift the object
while ensuring that the robots are less likely to be overburdened,
which could lead to hardware failure as well as increase the likelihood
of dropping the object being transported. We have been
investigating algorithms for distributing the weight of a 2D polygonal
uniformly-weighted object by determining efficient placement of a team
of robots based on the center of gravity of the object.
- Hierarchical
Robot
Coordination
Individual
mobile
robots
are
limited
in
their
abilities to accomplish tasks that
require coverage of large areas. For example, if a single
robot had
to search for lost person/device in a terrain, it would be quite
difficult and time consuming. However, if a large team of
robots was
used for the search task, lost person/device would be found much more
quickly, provided that the robots are coordinated in their search
efforts. We performed research into ways of organizing
simple robots
(i.e., very few sensors) into hierarchical arrangements whereby small
teams of robots are managed by a team coordinator at the lowest
level. These coordinators are themselves managed by a
higher-level
coordinator, and so on. At the top level, a human can be
coordinating
the highest level of coordinating robots. This allows
global
knowledge to trickle down through the hierarchy so that the individual
robots can be directed to various areas of the environment more
efficiently and timely. Communication is simplified because
it only occurs between the individual robot and their coordinator,
who directs their efforts. Therefore, if any communication
failure
occurs within the hierarchy, the lower level coordinators can still
function, given their latest search directive.

- Simulation of
Robot Mapping in an Unknown Environment (Honours project
of Sophia Ho)
In this
project, we developed an algorithm to allow a robot with simple sensors
(e.g., whiskers and a compass) to create a map of an unknown 2D
environment with obstacles. The robot is able to trace out
the border of the environment as well as each individual obstacle to
produce polygonal representations of the environment. Since
the information comes only when travelling along obstacle borders,
there is no information available while the robot is travelling in the
open spaces of the environment. Hence, "theoretical bridge"
connections are introduced between various polygons to obtain relative
positioning between objects.
- Robot Colony
Simulation (Honours project of Jason Brink)
This project simulated a colony of robots that were able to interact
together to perform various tasks. One task that was implemented
was that of coordinated mapping. Each robot produced a
portion of the environmental map and then these maps were merged
together to produce a global map.
- PropBot Simulator (Honours
project of Darryl Hill)
A 4th year robotics
course here at Carleton made use of a limited number of PropBots (i.e.,
robots designed for the course) which were used within our robotics lab
test environment. In order to test robotic algorithms outside of
the lab setting, this software simulator was implemented which allowed
students to work at home to test their software in simulated robots
before coming in to the lab. The simulated robots were
developed to closely correspond to the actual PropBot robots in regards
to movements and sensors.
- Robot Colony Simulator (graduate course project)
This simulation tool
was developed to simulate colonies of robots that use very simple
instinctive neuron networks as those in my masters thesis robot.
This tool allows a user to create different kinds of cleaning robots
that can clean near well lit areas, near other robots and near
both. I created colonies with different behaviours by varying the
types of robots such as swarm leaders, followers and light directed
cleaners. By observing the behaviour of these robots I was able
to determine which types of robots performed well together. A
more important result is that the robots are able to perform well
together even with minimal sensor complexity.

The robots have very simple sensors such as detecting light and signals
from other robots. It allows the user to investigate different
kinds of swarm behaviour and see how they apply to simple tasks such as
cleaning an environment. The program has nice interface that
allows the user to add sensors and actuators to the robots and code
their behaviour at run-time. In addition, users can design
instincts as networks of neurons by using a graphical drag and drop
interface. The system allows the user to make libraries of
robots, sensors, actuators and instincts. The screen snapshots
below show the dialog boxes for creating robots, sensors and instincts:
- Motivation System (graduate course project)
This project
investigated the various mechanisms that motivate behaviours in A.L.
(artificial life). The system simulates a colony of bugs whose
main goal is to remain alive. The bugs have attract/repel
behaviours to various kinds of stimuli (such as different foods, bugs
of the same or different sex, light sources and gravel patches).
The bugs are able to do multi-level associative learning in their
behaviour hierarchy which allows them to stay alive.
The user can add multiple bugs to the environment as well as various
types of stimuli. The user can poison certain foods and or zap bugs
when they are doing something considered "bad". For example, the user
can stop male bugs from chasing female bugs or stop a bug from eating
apples that are on gravel patches near light sources. Some very
interesting behaviours emerge from varying the stimuli and punish
patterns. As a bonus feature, there is a brain browser (see image
below) that allows the user to examine the brain of a bug to view the
hierarchical behaviour mechanisms that led it to behave in a certain
manner as well as observe the associative learning that has taken place.

- Neural Network-Driven Robot Insect
(graduate course project)
This project involved
implementing an insect that learns how to coordinate its legs to
achieve walking by using back propagation neural networks. Each
leg has its own network that indicates whether the leg should be in
stance mode (down and pushing backward) or swing mode (up and swinging
forward). The network of each leg connects to the adjacent legs
across and behind it. When the insect falls down (i.e. not enough
legs are in stance mode or the center of gravity is off balance), then
the leg networks are "punished". The leg networks are all
rewarded when the insect makes forward motion. When created, the
insects are endowed with a certain amount of pre-learnt
instincts. After about 20 seconds (which varies depending on the
amount of instinctive learning), the insect is able to coordinate its
legs and walk. The user can then pluck off some of the legs and
watch as it attempts to compensate for the lost limbs. As an
additional feature, the insect has two back propagation networks linked
to light sensors. The insect is able to quickly learn how to seek
out light sources.










