Robotic Designs
I designed various
robots for
use
in
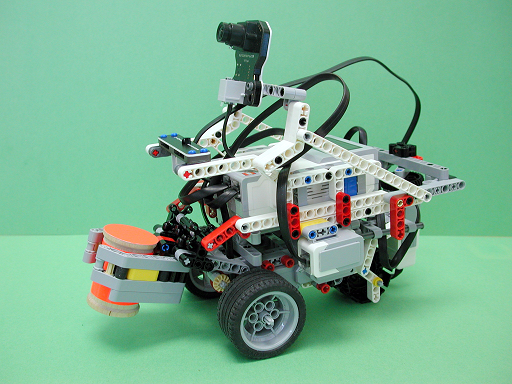
the COMP1807 and COMP2807 courses using the Lego Mindstorms EV3
kit. There are too many
designs to show here.
I designed various
robots for
use
in the COMP1807 and COMP2807 courses using the Lego Mindstorms NXT
kit. Some of the designs were based on existing designs
from others and some were designed from scratch. There are
too many designs to show here.
The final PropBot
version was a completely redesigned robot with custom-made processor
and sensor boards. It has a pan/tilt head mechanism and
front grippers that open and close. It maintains the sonar
sensor, CMU camera, Sharp IR sensor and encoders from the previous
version but it now uses 8 Sharp IR sensors (3 at the front, 2 on each
side and one at the back). A battery monitor was also
added. It has expansion ports for a compass, accelerometer
and beacon sensor.

The PropBot was an
improvement over the BOE bot in that it used a Propeller microprocessor
which has 8 processors running in parallel. It allowed for
dedicated processes to control the robot's motors and communications
while allowing the user-defined program to concentrate on the logic as
opposed to motor and communication timing. There is also a
front-mounted CMU cam and improved wheel encoders as well as
front-mounted Sharp IR distance sensors that provided better accuracy
for collision avoidance.

This improved version
of the BOE bot had a side-mounted IR sensor and also had a block guide
and sensor at the front so that the robot could push around cylindrical
blocks. It used the BasicX microprocessor which was more
powerful.

The Board of
Education was used as the main processor for this robot which was used
in the COMP4807 robotics course. I created it with an
ultrasonic sensor, IR range sensor and some front and side proximity
sensors as well as encoders, light sensors, a compass and bluetooth
communication module. It ran using the Basic Stamp II
microprocessor.
This was a robot with
a MiniPC as its processor. It was assembled by Tyler McGill
as a directed study in the School of Computer Science. It
had IR sensors all around and cameras. It was to used as a
testbed for various experiments. It was built with many
expansion capabilities.

RABI (short for
"Robotic Adaptive Behavioral Insect") is a 6-legged robotic platform
that can be interfaced to an external computer through a tether. It has
4 frontal antennae (whiskers) and two on the side. It is capable of
walking, turning, overcoming small obstacles, avoiding collisions,
following edges, mapping and navigation. It uses 12 motors to lift its
legs. RABI was built as part of my Master's Thesis in Computer Science.
I initially wanted a robot that could walk and climb in a varying
terrain, but I realized that it would take more time and money than I
had. The main difficulty I encountered during construction
was that the robot could not support its own weight, let alone lift
itself up. I went through several pain-staking leg designs in order to
achieve a robot that could hold its own weight. It took 6 months to get
the thing to walk.

The "Creeper" is a
small 8-legged robot that can be steered by a light source. The robot
has tethered 12 and 5 volt power supplies but is otherwise
stand-alone. It was designed and built for the 3rd
International BEAM Robot Olympic Games in Toronto, Ontario in 1994. It
was built for the legged race event in which non-wheeled robots were to
race one another from a start line to a finish line. This
little guy won the gold medal in legged race since its 12volt motors
were much quicker that the other competitors which uses solar cells and
contracting "muscle" wires. The main difficulty I
encountered was that of creating strong enough legs that would hold the
body as well as provide forward motion. The large 12 volt motors added
additional weight which was compensated for by the large external power
supply.

The
"Ascender"
is a small rope climbing robot, which is not unlike an
automatic yo-yo. Once attached to the bottom of a rope (actually
fishing line), it can climb to the top and back down. It is
light-activated (that is, it starts and stops when a light shines upon
it). The speed and distance of the climb are both
adjustable. It was designed and built for the 2nd
International BEAM Robot Olympic Games in Toronto, Ontario in 1993. It
was built for the rope climbing event in which robots raced one another
up and down a fishing line of 1 meter in length. In this context,
it won the silver medal in rope climbing in 1993 and won the gold medal
in 1994. The main difficulty that I encountered was that the
motors drew a lot of amps from the 9v batteries which caused the logic
circuits to occasionally overheat and shut down. Since the speed of the
robot was adjustable, I ran it at slow speeds to avoid overheating.
Also, camera flashes from photographers at the olympic games caused the
robot to suddenly stop climbing (I hadn't thought of that).

This
is the first of my robots built using the LEGO Mindstorms RCX
kit. The robot is able to walk on 4 legs ... a little like using
a
walker (like the kind you see little old ladies using). The robot
moves all 4 legs at the same time to lift itself up, then moves its
body forward and the places its body back down again. The
two frontal antennae allow the robot to steer around
obstacles. The eyes here are just for show and do not have
any functionality.

- "High School
Science Project Bot"
The first robot that I ever built was for a high school science
project. My dad helped me with the design, the electrical aspects
and also to put it all together. Unfortunately, I have no
pictures ... so here is a diagram. It was tethered to a
control box that was plugged in. The frame was a wooden box
covered with black material. The control box had many
switches that allowed me to steer the robot around (had old drill
motors underneath). It had two grippers at its front that
could be moved up and down and opened and closed. It had
LED eyes that lit up and there were many sound modules that allowed it
to make various kinds of noises.