Vision-based
sensors
such
as
stereo
cameras,
are
often used on mobile robots for
mapping and navigation purposes. Cameras provide a rich set of
data
making them useful for object recognition, localization and detecting
environmental structure. When obtaining range measurements, however,
stereo camera vision systems do not perform well under some
environmental conditions such as featureless regions (e.g., blank
walls), large metallic or glass surfaces (e.g., windows) and low
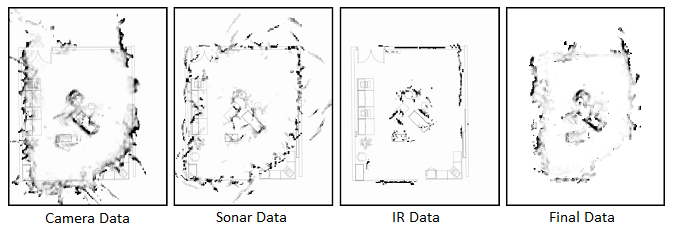
lighting scenes. We have investigated the improvement of range data
obtained from a stereo camera vision system through the fusion of
additional sonar and infrared proximity sensor data. Our results
showed that through sensor fusion, we were able to discard 49% of the
camera data as noise and improved our perimeter mapping by filling in
12% of the perimeter which was missing from the camera data alone.
- Controlling
Propbots With Microsoft Kinect (Honours project of Wes
Lawrence)
In
this
project,
we
investigated the idea of controlling a group of robots
through simple gestures and voice commands. Such commands
can suggest to robots how to act, or instruct them to perform
particular
tasks. For example, point to a location, and the robot goes there
... or speak a single robot's “name”, and only that robot pays
attention to you. In our implementation, a Microsoft kinect
device was used to monitor the gestures and voice commands of a human
operator. Certain gestures were recognized as commands to
be sent to a group of robots to coordinate their movements and
tasks. This project was done as a "proof-of-concept" where
just a couple of robots were used (i.e., PropBots built by Mark
Lanthier) and just a few gestures were incorporated.
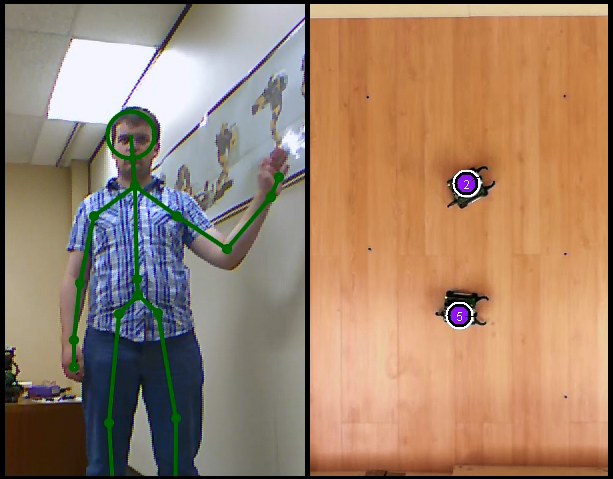
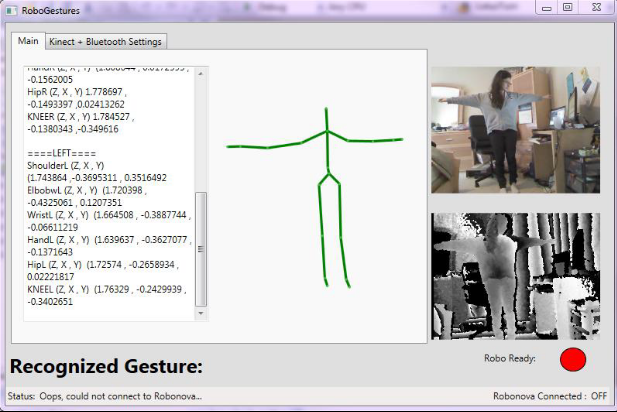
- Wireless Robotic
Imitation of Human Movements Using a Kinect (Honours
project of Joyce Tannouri)
The
main
goal
of
this project was to get a Microsoft Kinect sensor to
recognize user gestures, movements, and poses and then wirelessly have
a ROBONOVA-I mimic them in real-time using Bluetooth technology. Given
the ROBONOVA-I's limitations, using the Kinect's skeletal tracking and
depth capabilities allows to program a wide range of recognizable
gestures that can be performed by the robot. In the end, the robot was
able to combine different gestures and positions together while
maintaining balance and stability for a total of 50 movements.
- Scanning Objects
in 3D With Kinect (Honours project of Mohammed Khoory)
Robots often need to scan 3D environments to recognize landmarks and
create 3D representations of what they see around them. In this
project, we investigated the idea of scanning real-world objects with a
Microsoft Kinect device and representing them as geometric voxel
models. Different methods to help reduce the noise in the
data were explored. By controlling the resolution of the voxels,
the program was able to control the complexity and level of detail in
the resulting model.

- 3D Mapping and
Imaging (Honours project of William Wilson)
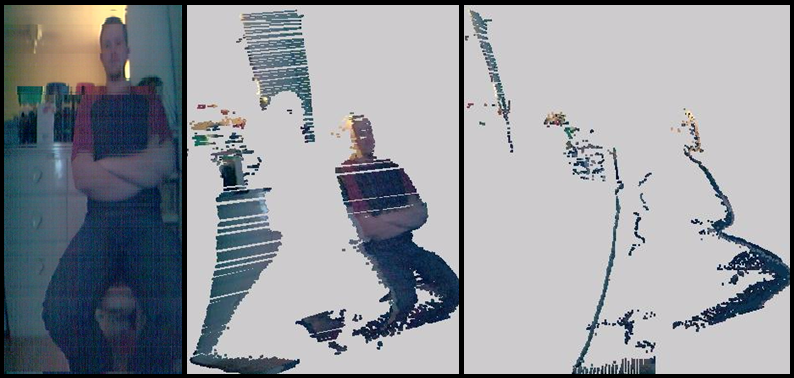
It
is
difficult
to
form accurate 3D models from simple 2D camera
data. 3D laser scanners are can produce more accurate 3D
models in terms of shape and size, but such scanners lack texture and
color information. In this project we combined 2D camera
image data with 3D laser scanner data to form 3D models of a
scene.
- Robot Tracker
Improvements (Honours project of Sara Verkaik)
GPS
systems give absolute positioning for outdoor vehicles, allowing a
drivers to know where they are within their environment.
However, in a small indoor environment, it is difficult to obtain
absolute positioning for robots because GPS systems do not work indoors
and would not provide adequate accuracy for robotic task
completion. In our lab, we developed an overhead camera
system to track robots based on recognizing various colored
tags. However, a need arose to be able to distinguish more
robots from one another, so a tag-based system had to be
developed. This project investigated various types of tags
and how they performed in regards to proper recognition from the
overhead cameras.
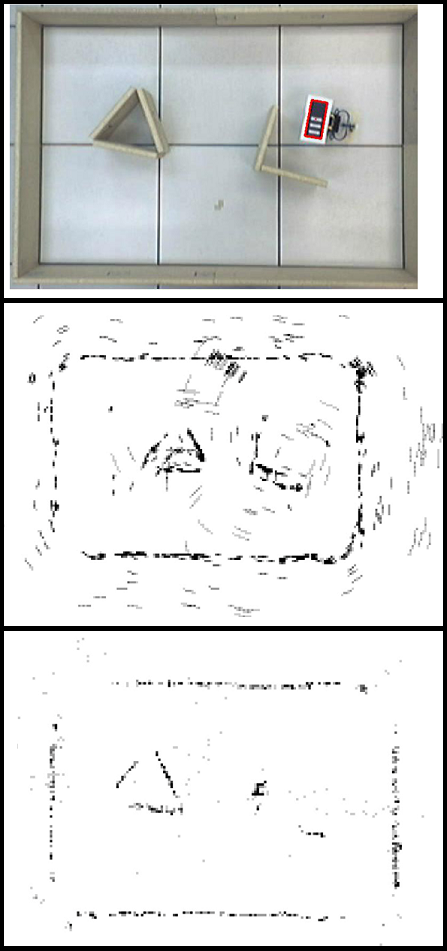
- 3D Scale Depth
Analysis (Honours project of Philip Carswell)
The pictures produced from a stereo
camera may have inaccurate depth data due to lack of contrast. In
this project, a "manual-fix" feature can be used to manually choose
which pixels to fix, and at what depth. Because this process is
impractical and time-consuming, two "automatic-fix" algorithms were
created to fix the depth data. One is based on searching for the
closest correct depth data to replace the faulty one, while the other
averages depths surrounding the faulty pixel in an N by N area, which
is specified as input to the algorithm.
- Map Generation
Ultrasonic and IR Sensory Data (Honours project of Jason
Humber)
This project investigated the accuracy
of maps that could be obtained by using a Sharp GP2D12 IR distance
sensor and a MindSensors Ultrasonic Proximity Sensor mounted on a robot
whose position was tracked by an overhead camera tracking system.
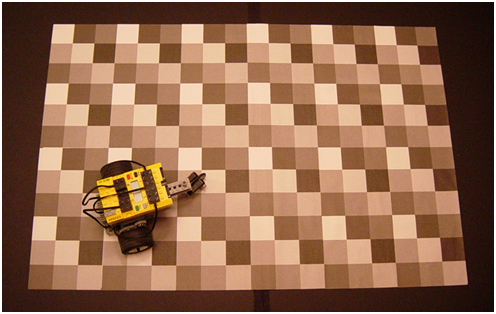
- Spatial Cognition
Using a Specialized Grid (Honours project of Dwayne
Moore)
In this project we investigated the
ability of a robot to keep track of its location within a grid
environment through use of a simple light sensor under the
robot. By using various shades of gray arranged in a
pattern, the robot was able to maintain a fairly accurate estimate of
its position by recognizing when it had moved from one grid cell to
another.